Unser Code:

gyro_straight

Ständige Weiterentwicklung hat zu einem sehr präzisen Fahren geführt, welche durch verschiedenste Funktionen unterstützt wird
Geschwindigkeit
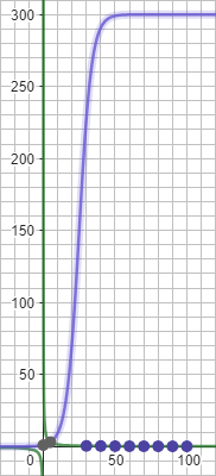
Dank der Funktion eines Logistischen Wachstums können wir die Geschwindigkeit des Roboters optimal steuern, wobei sich die Funktion automatisch an die Eingabewerte anpasst .
gyro_turn
Durch das Kalibrieren des Gyros und einer nehezu perfekten Geschwindigkeitsberechnung können wir uns auf den grad genau drehen.
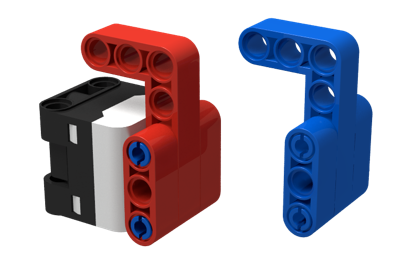
Farbanalyse

Bei unserer Farbanalyse definieren wir einen hsv-Wertebereich, um die Farbe auf 100% genau zu bestimmen. Damit erkennen wir zum Beispiel, dass das rote Modul auf unserem Roboter aufgesetzt ist, und Run 7 starten soll.
PID-Fahren
PID-Berechnung:
Ermöglicht Geradeausfahren ohne große Abweichungen auch unter veränderten Bedingungen dank der perfekten Auswertung des Gyros
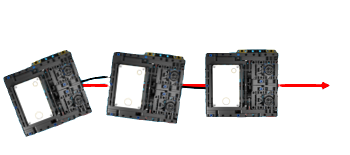
Navigation

Navigation:
Die Sensoren werte werden nur am Anfang des Runs zurückgesetzt.
Danach wird auf den jeweiligen Wert ohne Zurücksetzen gefahren.