
Robotdesign
Auf dieser Seite erfährst du alles wichtige über unseren Roboter, wie er programmiert ist und weiteres.
Wir nutzen diese Seite um das wichtigste davon bei unseren Wettbewerben den Juror * innen zu präsentieren.
Aus dem Grund, dass es uns extrem wichtig ist, unser Wissen mit dir zu teilen,
verfassten wir diese Internetseite.
.jpeg)
Unsere Strategie besprechen wir gemeinsam am Anfang jeder Saison. Im Laufe der Saison entwickelt sie sich dann weiter, zum Beispiel durch das Hinzufügen von weiteren Runs.
Unsere Strategie
Wir achten darauf, nur kurze und somit zuverlässige Runs zu planen (7 Stück).
Zudem ist es uns sehr wichtig, dass wir jeden Bereich der Matte nur einmal anfahren.
Desweiteren versuchen wir in unseren Runs möglichst viele Aufgaben gleichzeitig zu lösen.

Modulentwicklung
Ideen sammeln

Wenn wir ein Modul entwickeln möchten, versammeln sich alle Konstrukteure und sammeln gemeinsam Ideen und Lösungsvorschläge.
Prototyping

Als nächstes bauen wir verschiedenste Mechanismen als Prototypen und versuchen die bestmögliche Lösung zu finden und wenn Bedarf besteht, diese zu verbessern.
Modul

Nachdem wir einen guten Prototypen geschaffen haben, bauen wir daraus das fertige Modul. Kleine Verbesserungen werden auch dort noch vorgenommen und möglichst Overengineering vermieden.
Testphase

In der ausgiebigen Testphase testen wir unseren Roboter, um Fehler schnellstmöglich zu erkennen.


Fehlermanagement


YouTube
Wir nutzen verschiedenste YouTube Videos, um weitere Kompetenzen zu erhalten.
Github Repositorien
Um uns ein so breites Kompetenzgebiet für Lego Roboter Software anzueignen haben wir unter anderem verschiedene Github Repositories verwendet.
Experten
Contact
OStR Marco Grees
Gymnasium Gars

Roboticboys

MANO Sapiens

Marbots

R2D2
Bei auftretenden Fehlern melden wir uns bei unseren Experten. Dazu gehören die Roboticboys (Sebastian Brunei), die ManoSapiens (Dieter Goedel), die MarBots (Jannik Goldbach) und R2D2 (Costa Rica).


Versionsmanagement

Lego Education
Bis 2022 nutzten wir Scratch. Seit 2024 sammeln wir erstmals wertvolle Erfahrungen mit fortschrittliche Regler , wie beispielsweise den PID-Regler für unser Gyro-fahren.
Lego Education
Bis 2022 nutzten wir Scratch. Seit 2024 sammeln wir erstmals wertvolle Erfahrungen mit fortschrittliche Regler , wie beispielsweise den PID-Regler für unser Gyro-fahren.


Lego Education
Bis 2022 nutzten wir Scratch. Seit 2024 sammeln wir erstmals wertvolle Erfahrungen mit fortschrittliche Regler , wie beispielsweise den PID-Regler für unser Gyro-fahren.

Robot-C
Nachdem wir einige Erfahrungen beim Dach-Finale gesammelt hatten, beschlossen wir Robot-C in Verwendung mit dem EV3 zu nutzen. Gründe dafür waren unteranderem die geringen Zeiten, die man benötigt um die Sensoren abzufragen mit der Programmiersprache C.

Pybricks
Nachdem wir während der WRO 2024 erstmalig auf Pybricks gestoßen waren, waren wir sofort von der Präzision sowie den Funktionen der Software begeistert.
Schnell lernten wir immer mehr darüber und nutzen unser Wissen um innovative Programme zu schreiben.

Pybricks in VSCode
Letztendlich stießen wir bei der Frage, wie wir Pybricks noch professioneller nutzen können, auf Visual Studio Code, das neben einer professionellen Entwicklungs-umgebung die gewohnten Pybricks Funktionen mit sich bringt. Dies werden wir mit Sicherheit in Zukunft weiterverwenden
Robot-C
Nachdem wir einige Erfahrungen beim Dach-Finale gesammelt hatten, beschlossen wir Robot-C in Verwendung mit dem EV3 zu nutzen. Gründe dafür waren unteranderem die geringen Zeiten, die man benötigt um die Sensoren abzufragen mit der Programmiersprache C.
Lego Education
Bis 2022 nutzten wir Scratch. Seit 2024 sammeln wir erstmals wertvolle Erfahrungen mit fortschrittliche Regler , wie beispielsweise den PID-Regler für unser Gyro-fahren.
Pybricks
Nachdem wir während der WRO 2024 erstmalig auf Pybricks gestoßen waren, waren wir sofort von der Präzision sowie den Funktionen der Software begeistert.
Schnell lernten wir immer mehr darüber und nutzen unser Wissen um innovative Programme zu schreiben.
Pybricks in VSCode
Letztendlich stießen wir bei der Frage, wie wir Pybricks noch professioneller nutzen können, auf Visual Studio Code, das neben einer professionellen Entwicklungs-umgebung die gewohnten Pybricks Funktionen mit sich bringt. Dies werden wir mit Sicherheit in Zukunft weiterverwenden
Benutzte Apps seit 2017
Lego EV3 Labview
Am Anfang nutzten wir den EV3 mit Labview, womit wir an ersten Wettbewerben teilnahmen. Jedoch bemerkten wir bald,
das es zuverlässigere Möglichkeiten, wie den Spike Prime mit entsprechender Software gibt.

Lego Spike Scratch
Bis 2022 nutzten wir Scratch. Seit 2024 sammeln wir erstmals wertvolle Erfahrungen mit fortschrittliche Regler , wie beispielsweise den PID-Regler für unser Gyro-fahren.
Robot-C
Nachdem wir einige Erfahrungen beim Dach-Finale gesammelt hatten, beschlossen wir Robot-C in Verwendung mit dem EV3 zu nutzen. Gründe dafür waren unteranderem die geringen Zeiten, die man benötigt um die Sensoren abzufragen mit der Programmiersprache C.
Pybricks
Nachdem wir während der WRO 2024 erstmalig auf Pybricks gestoßen waren, waren wir sofort von der Präzision sowie den Funktionen der Software begeistert.
Schnell lernten wir immer mehr darüber und nutzen unser Wissen um innovative Programme zu schreiben.
Pybricks in VSCode
Letztendlich stießen wir bei der Frage, wie wir Pybricks noch professioneller nutzen können, auf Visual Studio Code, das neben einer professionellen Entwicklungs-umgebung die gewohnten Pybricks Funktionen mit sich bringt. Dies werden wir mit Sicherheit in Zukunft weiterverwenden
PID - Regler

kp = Konstante
kd = Konstante
ki = Konstante
target = 0
error = target - angle
integral = integral + error
derivative = error - last_error
correction = (error * kp + integral * ki + derivative * kd)
last_error = error
Der PID-Regler ist ein vielseitig einsetzbarer Regler, der es ermöglicht einen Zielwert ohne große Schwankungen zu erreichen und zu halten. Ein entscheidender Nachteil des Reglers, ist das genaue Einstellen der Konstanten, weil es sehr zeitaufwendig ist.
Wir verwenden den PID-Regler beispielsweise für unser Geradeausfahren mit dem Gyrosensor, sowie in unserem Linefollower.

Navigation

Mit unserem selbst entwickelten Navigationssystem gibt man immer nur den Zielwinkel ein, bis zu dem sich der Roboter drehen soll. Dabei werden die Sensorwerte wie Rotationssensoren und Gyrosensor nur am Anfang jedes Runs zurückgesetzt, um immer optimal ausgerichtet zu sein und Abweichungen stetig zu korrigieren.
Dies wird uns unter anderem durch das genaue Kalibrieren des Gyros ermöglicht.

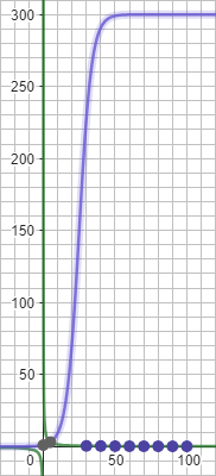
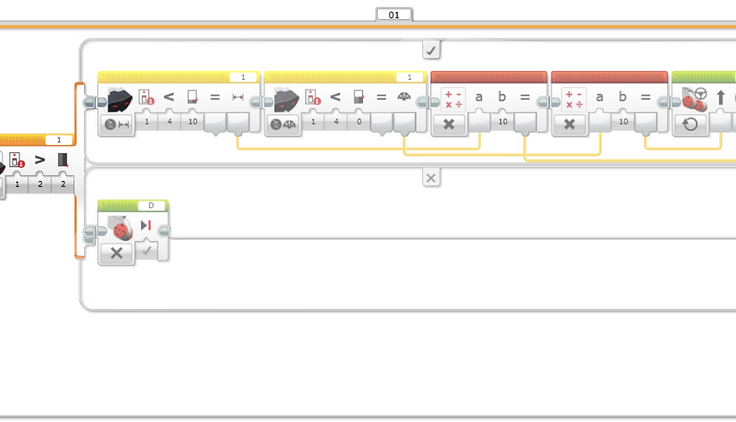
Geschwindigkeit

Unsere einzigartige und innovative Geschwindigkeitsberech-
nung löst sämtliche Probleme, wie z.B. den Spielraum der Lego-motoren.
Die Funktion passt sich automatisch an die gegebenen Beschleunigungsbereich an. Wir entwickelten diese Funktion in GeoGebra.


3d-Modellierung


Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2018/19

Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2020/21

Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2019/20

Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2021/22

Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2022/23

Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2023/24

Add paragraph text. Click “Edit Text” to update the font, size and more. To change and reuse text themes, go to Site Styles.
Fll 2024/25 - 2025/26



























