top of page
Our code:

gyro_straight

Continuous development has led to very precise driving, which is supported by various functions
speed
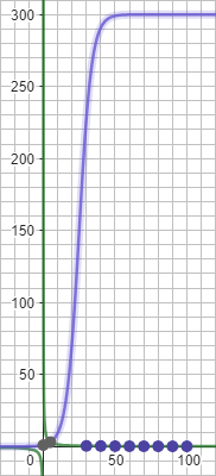
Thanks to the Logistic Growth function, we can optimally control the speed of the robot, with the function automatically adapting to the input values.
gyro_turn
By calibrating the gyro and calculating the speed almost perfectly, we can rotate to the exact degree.
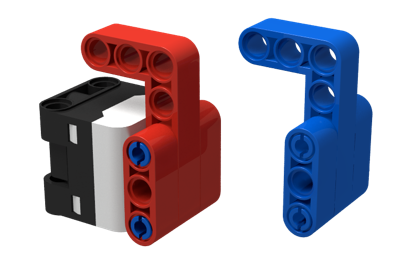
Color analysis

In our color analysis, we define an HSV value range to determine the color with 100% accuracy. This allows us, for example, to recognize that the red module is attached to our robot and that Run 7 should start.
PID driving
PID calculation:
Allows straight driving without major deviations even under changing conditions thanks to the perfect evaluation of the gyro
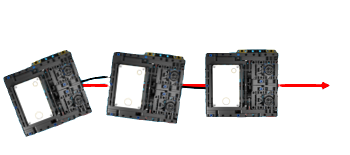
navigation

Navigation:
The sensor values are only reset at the beginning of the run.
Afterwards, the respective value is returned to without resetting.
bottom of page